Robot ini dibuat menggunakan tutorial di http://robotsquare.com/2013/10/01/education-ev3-45544-instruction/ 
Robot Arm H 25 ini terdiri dari 3 motor dan 2 sensor dan didesain untuk memindahkan barang.
Motor pertama digunakan untuk mengontrol arah robot. Motor berada di bawah roda gigi berwarna hitam
 |
| [Motor pertama sedang beraksi] |
Motor ini di sambung dengan roda gigi yang akan menggerakkan motor dan roda gigi lain yang tersambung ke touch sensor. Jika motor sudah melewati batas, touch sensor akan tertekan dan membuat motor berhenti. Jika touch sensor ini tidak ada, maka robot akan bergerak bebas dan bisa melilit dirinya dengan kabel.
 |
[Gambar touch sensor sedang bergerak.]
|
Touch sensor ini berada dibagian bawah robot.
Motor kedua digunakan untuk mengontrol tangan robot
 |
| Gambar motor kedua yang tersambung ke beberapa roda gigi. |
Ketika tangan bergerak keatas, sebuah beam kecil akan ikut tertarik dan menutupi sensor warna. Ketika sensor warna tertutup, motor akan berhenti.
 |
Gambar beam kecil yang sedang tidak menutupi sensor (atas) dan yang menutupi sensor (bawah).
|
 |
Gambar beam kecil yang menutupi sensor warna sedang berjalan.
|
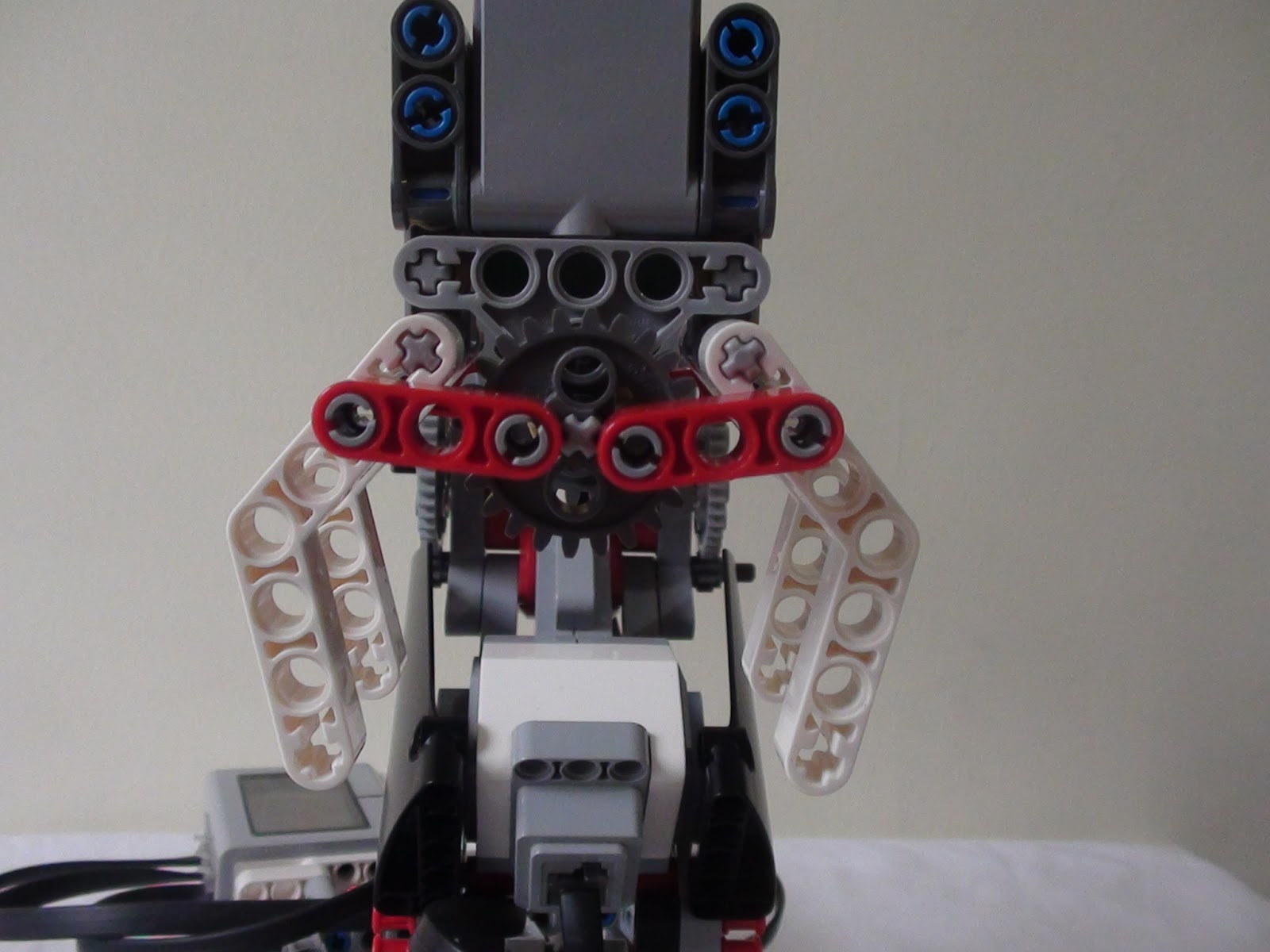
Motor ketiga digunakan untuk menggerakkan claw (cakar), dan lebih rumit dari dua motor lainnya. Motor ini menggerakkan roda gigi kecil yang tersambung ke roda gigi lain.
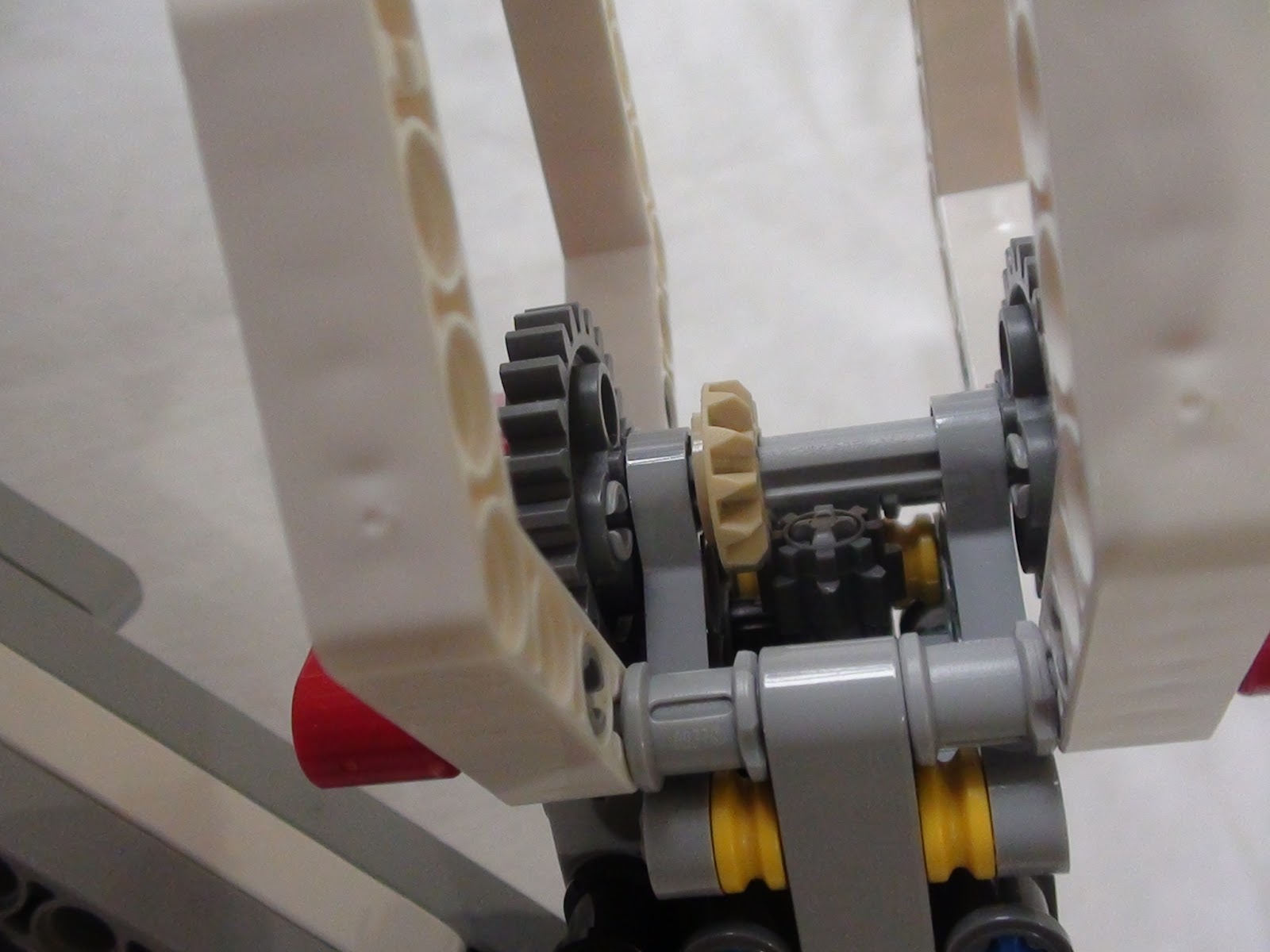 |
Gambar roda gigi pada claw.
|
Claw menggunakan teknik bevel gear dimana roda gigi horizontal dibelokkan ke roda gigi vertikal seperti pada gambar diatas.
Masalah sering terjadi disini ketika roda gigi berwarna kuning muda tidak tersambung ke roda gigi utama (roda gigi kecil berwarna abu abu) yang menggerakkan poros. Sambungan antara roda gigi kuning muda dan roda gigi kecil utama sangat penting, karena kedua roda gigi ini adalah roda gigi yang akan menggerakkan keseluruhan cakar.
Kadang kadang, roda gigi - roda gigi ini gagal bekerja karena tergeser sebanyak sekitar 1 mm karena getarannya sendiri. Walaupun kecil, geseran ini memutuskan sambungan kedua roda gigi ini sehingga cakar tidak bisa bergerak. Bahkan ketika robot ini dijalankan, cakar sering tidak berjalan walaupun tidak membawa apa apa. Ketika robot dibuat terbalik, biasanya cakar akan bergerak baik baik saja. Mungkin pengaruh gravitasi?
 |
| Gambar claw |
Wow. Cara analisisnya lebih dari kemampuan yang diajarkan di PRD ;). Konsep sensory-motor, teknik pemilihan gear, dan analisisnya. Thumbs up!
BalasHapus